
|

|
|
近日,金沙官网博士生刘成林在导师徐志刚教授的指导下,以第一作者身份在交通运输工程学科国际顶级期刊《Transportation Research Part C : Emerging Technologies》(TR-C)上发表论文“A multistep cooperative lane change strategy for connected and autonomous vehicle platoons departing from dedicated lanes”(自动驾驶专用车道车辆队列多步协同换道策略)。论文通信作者为徐志刚教授和刘志广讲师,论文第一署名单位和通信作者单位均为3354cc金沙集团。

该论文指出在自动驾驶专用车道上,自动驾驶车辆更容易组成车队。然而,当车队需要从专用车道换道至相邻的普通车道并与人工驾驶车辆混行时,如何实现车队快速换道并在换道后保持车队队形不变是一个挑战。本文的创新之处在于:
1、提出了一种考虑目标车道人工驾驶车行为不确定性的自动驾驶车队强制换道策略。
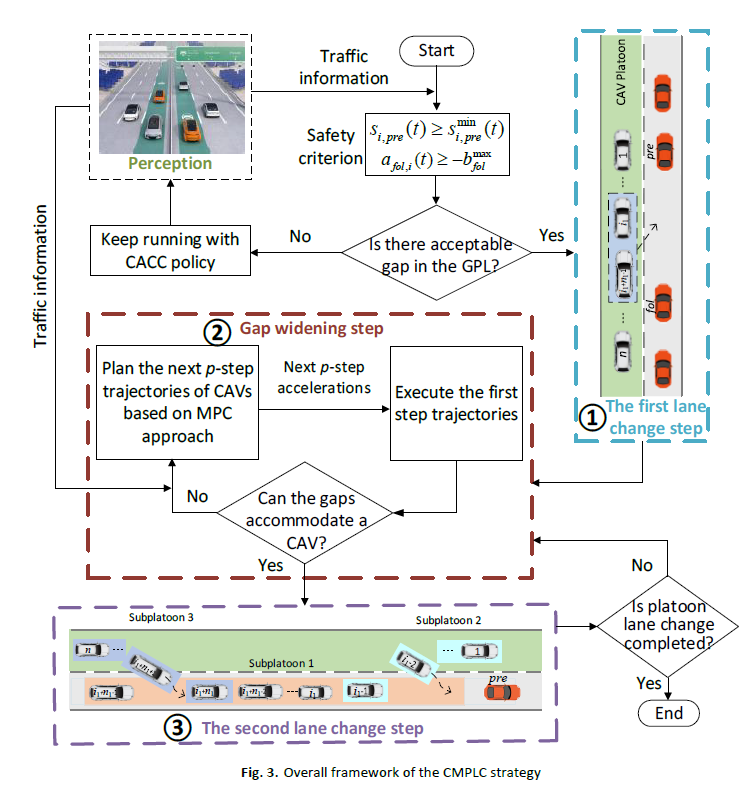
图1 策略框架
2、基于模型预测控制方法构建了三种自动驾驶车轨迹规划模型,以实现队列分步协同换道,同时保证车队在换道后的队形不变。
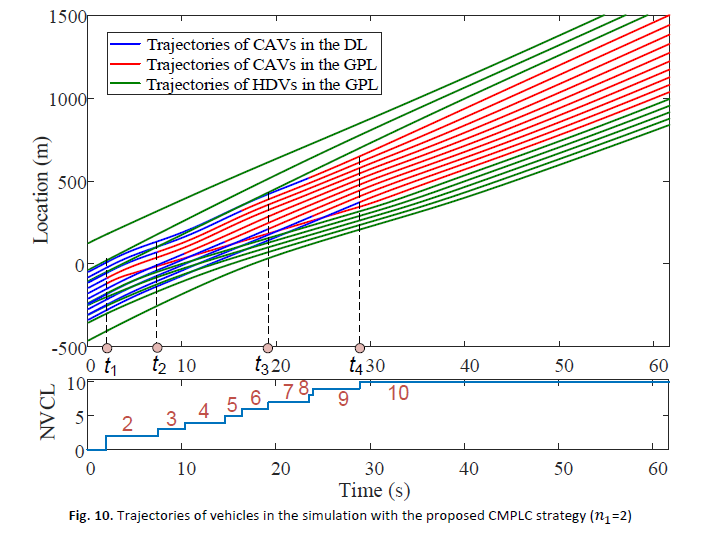
图2 分步多车协同换道轨迹
3、给出了队列在各种场景下的换道关键位置,以确保车队的换道成功率。
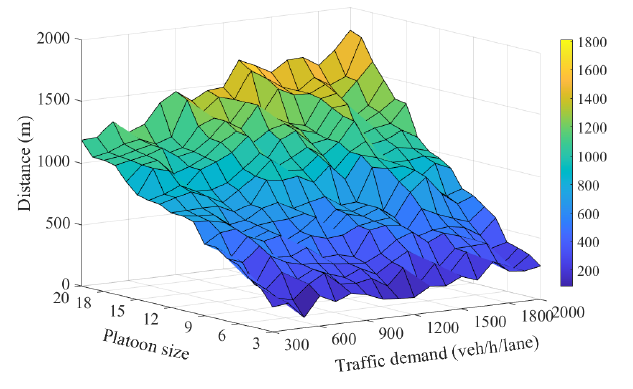
图3 车队换道关键位置
TR-C是全球交通运输学科领域的顶级期刊,主要报道前沿新兴技术在交通运输领域的最新应用,该刊当前影响因子为8.3,在中科院和科睿唯安JCR分区中均属于Q1类Top期刊。
近年来,学院聚焦我校交通运输工程学科“双一流”建设目标和学院信息学科水平提升计划,在获批高水平科研项目和产出高水平科研成果方面持续突破,取得了一系列重要进展。
刘志广 供稿,供图 王威 审核
 校园信息门户
校园信息门户
 长大主页
长大主页
 图书馆
图书馆
 教师业务系统
教师业务系统
 办公邮箱
办公邮箱
